Deze pagina geeft informatie over het correct plaatsen van een point cloud in Revit.
Een laserscanner maakt veel meetpunten. We noemen deze meetdata een puntenwolk oftewel een pointcloud. Deze pointcloud is vrijwel direct bruikbaar in volledige versies van Autodesk Revit. De pointcloud wordt in Revit als onderlegger gebruikt om een reeds bestaand model te controleren of om een nieuw Revit model te maken. Deze pagina legt uit hoe ruwe laserscandata tot een bruikbaar bestand voor Revit wordt gemaakt en wat men ermee kan doen. Het verhaal is gebaseerd op een situatie met een bestaand gestript gebouw waarbij een reeds bestaand Revit model wordt gecontroleerd met behulp van een pointcloud.

Pointcloud in Autodesk Revit
Over best-fit en coördinatenstelsels
Stel; het gebouw is gescand en de verschillende gemaakte scans zijn tot één grote pointcloud verbonden. De totale pointcloud die nu is ontstaan noemen wij een geregistreerde pointcloud. Deze pointcloud moet op de juiste plaats in het coördinatenstelsel geplaatst worden om in Revit op de goede plaats te verschijnen. Het is van groot belang om goede afspraken te maken met alle partijen over het coördinatenstelsel. De positie van de pointcloud wordt namelijk afgestemd op de positie van het Revit model in het coördinatenstelsel en niet andersom. Spelregel daarbij is wel dat het Revit model absoluut niet meer van plaats mag veranderen in een latere fase! Het coördinatenstelsel – of de grondslag – mag nooit gewijzigd worden.
Ongekleurde pointcloud in Leica Cyclone
Het is praktisch niet mogelijk om de pointcloud exact passend op het Revitmodel te plaatsen. Het Revitmodel is namelijk een schematisering van de werkelijkheid terwijl de pointcloud de echte werkelijke vormen laat zien. Er dienen een aantal handelingen plaats te vinden om een best-fit te krijgen van de pointcloud in het Revitmodel. Deze handelingen staan hieronder omschreven.
Pointcloud in juiste coördinatenstelsel plaatsen
Wil je weten hoe je een pointcloud in het juiste coördinatenstelsel plaatst? Hieronder leggen we uit hoe je dat precies doet en wat de verschillende stappen zijn.
- Maak een export vanuit Revit naar *.dwg.
- Open de *.dwg in bijvoorbeeld Autocad.
- Zoek overeenkomstige punten tussen de pointcloud en de *.dwg.
- Tip: gebruik daarvoor Cloudworx of een 3D viewer om goed te kunnen zien of de gekozen punten wel correct gekozen zijn en redelijk met elkaar overeenkomen.
- Geef de gekozen punten aan in de *.dwg. Zie afbeelding hieronder. Je maakt dus telkens een punt in de *.dwg. Het aantal aan te maken punten wordt bepaald door de mate van afwijking tussen de werkelijkheid (de pointcloud) en het theoretisch model (het Revit model). Het is raadzaam om altijd minimaal vijf punten te maken, bij voorkeur zoveel mogelijk in de uithoeken van het gebouw.


- Geef de gekozen punten aan in de pointcloud. Zie de afbeelding hieronder. Je maakt dus telkens een Vertex aan in de pointcloud in Cyclone. Het aantal aan te maken punten wordt bepaald door de mate van afwijking tussen de werkelijkheid (de pointcloud) en het theoretisch model (het Revit model). Het is raadzaam om altijd minimaal vijf punten te maken, bij voorkeur zoveel mogelijk in de uithoeken van het gebouw.

- Lees de coördinaten af van de punten in de *.dwg en plaats deze in een *.txt-file. Dit file wordt straks als meetdatafile in Cyclone gebruikt en dient dus op de correcte manier opgebouwd te zijn uit kolommen X-Y-Z met de nodige spaties etc.
- Geef alle punten dezelfde Z-waarde. Tip: kies zoveel mogelijk punten op b.k. vloer.
- Open het project in Cyclone, maak een nieuwe scanworld aan en importeer de *.txt-file in deze scanworld.
- Maak een nieuwe registratie van de reeds gemaakte registratie en de nieuw aangemaakte scanworld.
- Zet daarbij de nieuwe scanworld als home-scanworld.
- Rond de registratie af. De nieuwe pointcloud staat nu op de juiste plaats in het coördinatenstelsel.

Wat kun je met een pointcloud in Revit?
De pointcloud is een vast “blok” in Revit. Het reageert op dezelfde manier op snijden als alle andere Revit-elementen. Het blijft natuurlijk nog steeds een puntenwolk. Dit betekent dat een brede snede (bijvoorbeeld het genereren van een verticale doorsnede) een dik deken van punten laat zien. Een smalle snede levert een dunnere strook van punten dat bijna op een lijn lijkt. Dit is natuurlijk wel afhankelijk van het aantal punten in de pointcloud.
De onderstaande afbeelding laat het beeld en de meerwaarde zien van een pointcloud in Revit. Zoals je ziet ligt de balk in de werkelijkheid op een andere plaats. Een andere bestaande balk komt in het geheel niet voor in het Revit-model. De onderzijde van de vloeren blijken in de praktijk wat lager te liggen.
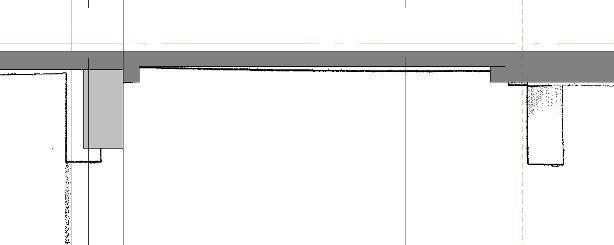
Verticale snede pointcloud in Revit
Wat kan er verkeerd gaan met een point cloud in Revit?
Het werken met een point cloud in Revit kan tot teleurstellingen leiden. Het werken met pointclouds is niet eenvoudig en vereist oefening en kennis. Daarbij moet men zich blijven beseffen dat een pointcloud voorlopig nog een wolk van veel punten blijft. Scan-to-BIM is onzin wanneer men de woorden te letterlijk neemt. Het is daarbij belangrijk dat men het bestaande gebouw en de situatie tijdens het inmeten kent en begrijpt.
In veel gevallen hebben de tekenaars het gebouw echter niet bezocht en al helemaal niet tijdens het laserscannen. Daarom adviseren wij het gebruik van een 3D viewer, bijvoorbeeld de Leica Truview. Hiermee kan de tekenaar het gebouw en de laserscanopname bekijken vanuit het oogpunt van de scanner op het moment van de meting.

Voorbeeld screenshot van Leica Truview